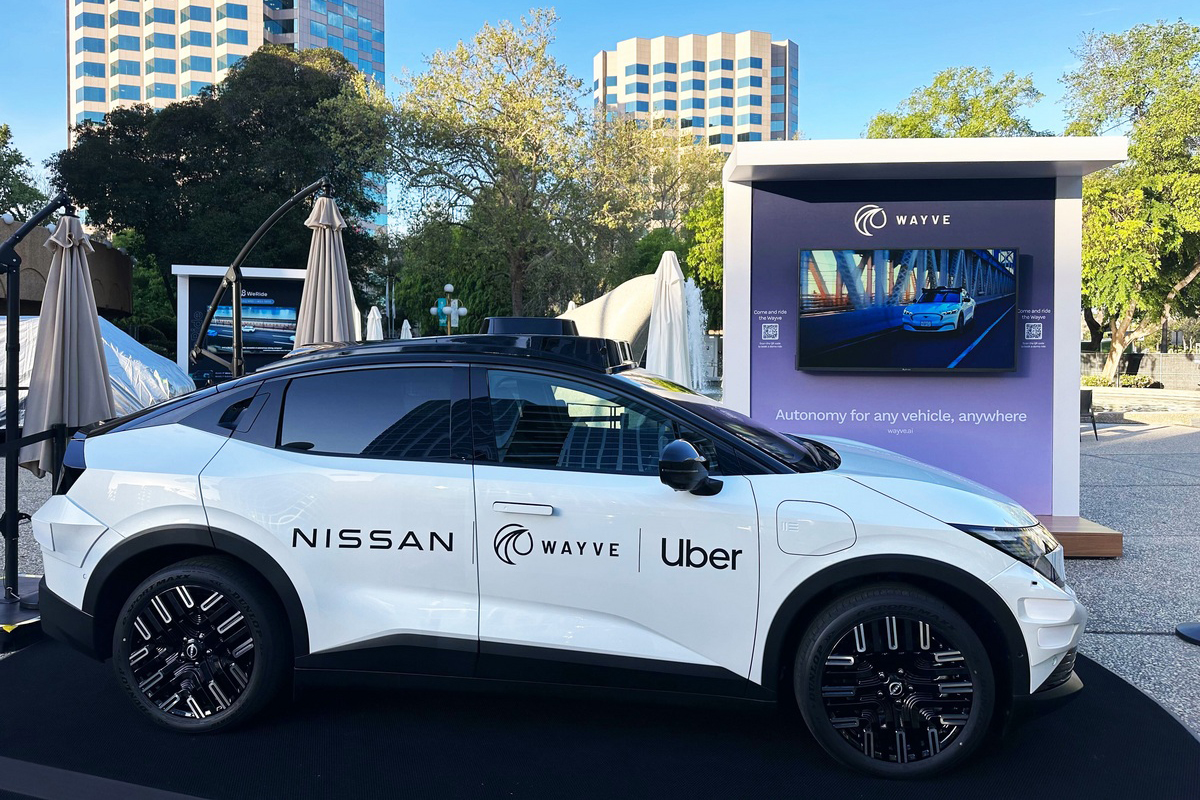
Auf der aktuell stattfindenden Entwicklerkonferenz NVIDIA GTC stellen Nissan und Wayve ein weltweit einsetzbares Robotaxi-Konzept vor, das auf der neuesten Generation des Nissan Leaf basiert. Die Präsentation knüpft an eine kürzlich angekündigte Kooperation zwischen Nissan, Wayve und Uber an. Gemeinsam planen die Unternehmen ein Testprogramm für autonome Taxis in Tokio, das – sofern die zuständigen Behörden grünes Licht geben – gegen Ende des Jahres 2026 starten soll.
Robotaxi-Plattform für den globalen Einsatz
Der Prototyp nutzt den vollelektrischen Nissan Leaf als Grundlage und verbindet dessen Fahrzeugarchitektur mit der KI-Software von Wayve sowie der Plattform NVIDIA DRIVE Hyperion. Das Fahrzeug wurde mit vollständig redundanten Systemen ausgestattet, die speziell auf den Betrieb autonomer Taxi-Dienste ausgelegt sind. Im Rahmen der Kooperation integrierte Nissan den sogenannten „AI Driver“ von Wayve in seine moderne Fahrzeugplattform, um die Entwicklung einer skalierbaren Robotaxi-Lösung zu beschleunigen.
Die technische Basis bildet die Referenzarchitektur von NVIDIA für autonome Fahrzeuge. Das System arbeitet mit zwei Prozessoren des Typs NVIDIA DRIVE AGX Thor, die genügend Rechenleistung bereitstellen, um komplexe KI-Modelle in Echtzeit zu verarbeiten. Gleichzeitig erfüllen sie die hohen Sicherheitsanforderungen moderner Pkw. Als Software-Grundlage dient NVIDIA DriveOS, ergänzt durch das Sicherheitsframework NVIDIA Halos, das Funktionen zur funktionalen Sicherheit sowie zum Schutz vor Cyberangriffen bereitstellt.
Sensorik und Fahrzeugtechnik
Der Prototyp verfügt über ein umfangreiches Sensorsystem, das eine lückenlose Wahrnehmung der Umgebung ermöglicht. Mehrere hochauflösende Kameras sorgen für eine vollständige 360-Grad-Sicht, während Radar-Systeme rund um das Fahrzeug sowie an der Front Entfernungen und Bewegungen präzise erfassen. Ergänzend kommt ein nach vorne gerichteter LiDAR-Sensor zum Einsatz, der zusätzliche Daten zur Umgebung liefert und damit auch schwierige Verkehrssituationen zuverlässig erfassbar macht.
Darüber hinaus unterstützt die Plattform zusätzliche Sensorik mit größerer Reichweite. Diese dient dazu, weitere Daten zu sammeln, Systeme zu validieren und neue Anwendungen während der Entwicklungsphase zu testen. Für den späteren Robotaxi-Betrieb plant Nissan außerdem Anpassungen im Innenraum, etwa Displays für Fahrgäste sowie Kommunikationslösungen, die den Komfort und die Interaktion während der Fahrt verbessern sollen.
KI-System „AI Driver“
Das von Wayve entwickelte System bildet das zentrale Element der autonomen Fahrfunktion. Die KI analysiert kontinuierlich die Daten der Fahrzeug-Sensoren, um komplexe Verkehrssituationen zu verstehen und darauf basierend sichere Fahrmanöver zu planen. Anders als viele andere Ansätze benötigt das System keine hochauflösenden Karten. Stattdessen lernt es aus realen Verkehrssituationen, erkennt Entwicklungen im Umfeld und berücksichtigt die möglichen Auswirkungen seiner Entscheidungen auf andere Verkehrsteilnehmende. Dadurch kann es auch in dynamischen Verkehrsumgebungen stabil und sicher reagieren.
Perspektive für Robotaxi-Dienste
Langfristig planen Wayve und Uber, die Tests autonomer Taxis auf mehr als zehn Städte weltweit auszudehnen. Schrittweise sollen die Fahrzeuge in ausgewählten Märkten eingeführt werden. Nach einer Testphase mit Sicherheitsfahrern im Fahrzeug soll der Übergang zu vollständig skalierbaren Robotaxi-Diensten erfolgen, die für einen dauerhaften kommerziellen Betrieb ausgelegt sind.